Introduction
The geometry of the fourth dimension reveals two forms that stand apart from all others in their mathematical depth and physical relevance: the torus and the hypercube. The torus is the shape of continuous flow — a closed, self-referential surface with two independent cycles, the natural geometry of fields and vortices. The hypercube is the shape of dimensional extension — the logical continuation of the point, line, square, and cube sequence into a fourth spatial direction. Together they form a complementary pair: one encodes circulation, the other encodes containment. This chapter examines both with mathematical precision, tracing their properties from topology and field theory through to higher-dimensional polytopes.
Key Takeaways
- The torus is a genus-1 surface topologically equivalent to S¹ × S¹ — the product of two circles — giving it two independent cycles that the sphere entirely lacks. This makes it the fundamental shape of self-sustaining field circulation.
- The Clifford torus exists in four-dimensional space as a perfectly flat surface of uniform curvature — an impossibility in 3D — demonstrating that the torus is intrinsically a 4D object.
- The tesseract has 16 vertices, 32 edges, 24 square faces, and 8 cubic cells, generated by translating a cube along a fourth spatial axis — the same operation that generates all lower-dimensional hypercubes.
- Toroidal geometry appears across physics and engineering wherever field containment is required — from plasma confinement to toroidal transformers — because the torus has no boundary for fields to escape through.
Topology of the Torus
In topology, surfaces are classified not by their metric properties — length, curvature, area — but by their connectivity: how many holes they have and what kinds of paths are possible on them. The sphere is the simplest closed surface: it has genus 0, meaning no handles and no through-holes. Every closed loop drawn on a sphere can be continuously deformed and shrunk to a single point without leaving the surface. The sphere is, in topological language, simply connected.
The torus has genus 1. It has one handle — one through-hole — and this single structural difference from the sphere has profound consequences. On the surface of a torus, there are two independent classes of loop that cannot be contracted to a point: the meridional loop, which goes once around the tube of the torus (around the small circle), and the longitudinal loop, which goes once around the central hole (around the large circle). Any other loop on the surface can be expressed as a combination of these two. The torus therefore has a two-dimensional fundamental group — Z × Z — while the sphere's fundamental group is trivial. In mathematical language, the torus is topologically equivalent to the Cartesian product S¹ × S¹: the product of two circles. Each point on the torus is specified by two independent angles, one for each circle.
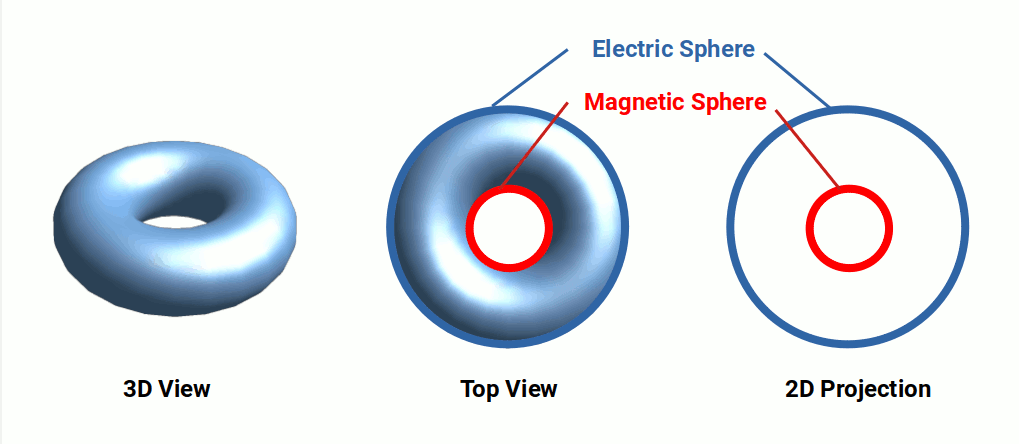
This topological structure has direct physical consequences. A magnetic field confined to a toroidal region has two independent degrees of freedom for its field lines. A vortex on a toroidal surface can sustain itself indefinitely through either of the two independent cycles. Precisely because the torus has two non-contractible loops, it supports two independent modes of circulation — and this is why nature repeatedly selects the torus wherever self-sustaining field dynamics are required.
The Clifford Torus
When the torus is constructed in three-dimensional Euclidean space by revolving a circle of radius r around an axis at distance R from its centre, the resulting surface has unequal curvature at different points. The inner equator (closest to the axis of revolution) curves more sharply than the outer equator (farthest from the axis), because the inner equator has a shorter circumference. This non-uniformity is not a property of the torus itself but a consequence of the constraint of embedding it in three dimensions.
In four-dimensional Euclidean space, the Clifford torus avoids this constraint entirely. It is defined as the set of all points of the form (cos θ, sin θ, cos φ, sin φ) in four-dimensional space, where θ and φ range independently from 0 to 2π. Because the two circles enter symmetrically into the definition — neither one plays the role of "major" or "minor" radius — the surface is perfectly flat: every point has exactly the same geometry. The Gaussian curvature of the Clifford torus is identically zero everywhere. It is a flat torus embedded without distortion in four-dimensional space.
The Clifford torus divides the three-dimensional sphere S³ (the set of unit vectors in four-dimensional space) into two congruent solid tori, a decomposition known as the Heegaard splitting of S³. This is a central result in three-manifold topology and one of the reasons the torus appears so naturally in higher-dimensional geometry. William Kingdon Clifford, who first described this surface in the nineteenth century, understood it as evidence that the correct home of the torus is four-dimensional space, not three. The ordinary torus we observe in three dimensions is, in a precise mathematical sense, a curved projection of the flat Clifford torus — just as a curved shadow on a wall is a projected image of a flat three-dimensional object.
Torus Types
The general torus is defined by two radii: the major radius R, the distance from the centre of the tube to the centre of the torus, and the minor radius r, the radius of the tube itself. Depending on the ratio of R to r, three distinct types of torus arise, each with different topological and geometric properties.
The ring torus (R > r) is the familiar donut shape. The inner circle of the torus (radius R − r) is non-zero; there is a genuine hole through the centre. This is the form most commonly encountered in mathematics and engineering, and it is the form whose topological properties — genus 1, S¹ × S¹ — hold in their most geometrically unambiguous way.
The horn torus (R = r) occurs when the major radius equals the minor radius. The inner equator shrinks to a single point: the hole closes, and the inner surface of the torus meets itself at a cusp — a point of infinite curvature. The horn torus still has genus 1 everywhere except at that singular point, but the self-intersection changes its global character. It is a limiting case between the ring torus and the spindle torus.
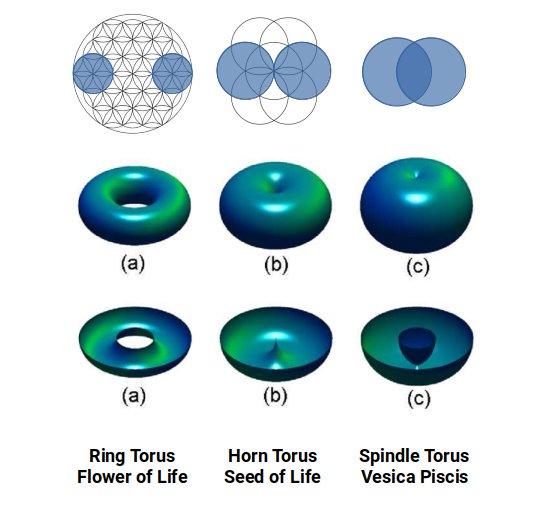
The spindle torus (R < r) arises when the minor radius exceeds the major radius, causing the generating circle to cross the axis of revolution. The surface self-intersects along two circles symmetric about the equatorial plane, creating a form sometimes described as an apple or lemon shape depending on the degree of overlap. Spindle tori are self-intersecting surfaces rather than embedded manifolds, but they remain well-defined in the mathematical sense and arise naturally in discussions of inversion geometry and the geometry of focal surfaces.
Sphere Packing and the Torus
The torus has a precise relationship to sphere packing — the problem of arranging identical spheres in space as efficiently as possible. In three dimensions, the densest possible packing of equal spheres is the face-centred cubic or hexagonal close-packing arrangement, in which each sphere touches twelve others, achieving a packing fraction of π/(3√2) ≈ 74.05%. When this packing is viewed from directly above a layer, the arrangement of sphere centres forms the hexagonal lattice — the same pattern as the Flower of Life.
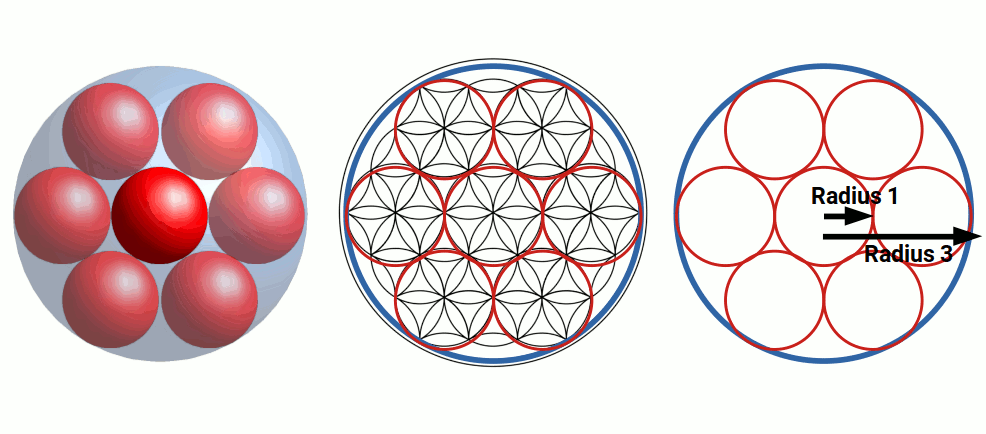
The connection to the torus emerges from the geometry of the cross-section. The ring torus with major radius R and minor radius r has an inner equator of circumference 2π(R − r) and an outer equator of circumference 2π(R + r). When R = 2r — a particular ratio that arises naturally in the sphere packing geometry — the inner circumference is exactly half the outer circumference, and the two characteristic lengths of the torus stand in the ratio 1 : 3. This ratio appears in the Flower of Life construction, where the inner circle of the pattern has exactly one-third the circumference of the outer circle. The torus, in this configuration, is the three-dimensional solid whose cross-sectional geometry matches the Flower of Life — the sphere-packing pattern that underlies much of sacred geometry is, in this precise sense, the two-dimensional shadow of the torus.
Applications of the Torus
The torus appears in physics and engineering wherever closed, boundary-free field containment is required — from plasma confinement in fusion reactors to toroidal inductors in precision electronics — because the torus's defining topological feature (no boundary) prevents fields from leaking out. In cosmology, toroidal topology is one of the candidates for the global shape of the universe. These applications are explored in detail in the sacred geometry and physics articles.
The Hypercube (Tesseract)
The hypercube is generated by the same operation applied repeatedly at increasing dimensions: take the current form and translate it perpendicularly to all of its own dimensions. A point translated generates a line segment — 2 vertices, 1 edge. A line segment translated perpendicularly to itself generates a square — 4 vertices, 4 edges, 1 face. A square translated perpendicularly to itself generates a cube — 8 vertices, 12 edges, 6 faces, 1 cell. A cube translated perpendicularly to all three of its own dimensions generates a tesseract — 16 vertices, 32 edges, 24 square faces, 8 cubic cells, 1 four-dimensional interior.
The element counts follow a consistent rule. At each dimensional step, every element of the lower-dimensional form doubles (producing one copy at each end of the translation) and then gains new connecting elements. Extending the cube into a fourth dimension creates two cubes — original and translated — connected by new edges between each of the 8 corresponding vertex pairs, new square faces between each of the 12 corresponding edge pairs, and new cubic cells between each of the 6 corresponding face pairs. This gives 8 + 8 = 16 vertices, 12 + 12 + 8 = 32 edges, 6 + 6 + 12 = 24 faces, and 1 + 1 + 6 = 8 cells. Every number is accounted for by the geometry of the construction.

The most commonly reproduced three-dimensional projection of the tesseract is the Schlegel diagram: a small cube nested inside a larger cube with corresponding vertices connected by edges. This projection is accurate in its combinatorial structure — it correctly shows all 16 vertices and 32 edges — but misleading in its geometry, because the inner and outer cubes are actually the same size in four-dimensional space. The apparent size difference is a depth-projection artifact, exactly as the far face of a cube drawn in perspective appears smaller than the near face. Animated rotations of the tesseract in 3D projection are a more faithful representation, because they show how the projected image changes continuously as the viewing angle in four-dimensional space changes — building genuine geometric intuition for the fourth dimension. The sacred geometry perspective on the torus and its connection to four-dimensional space is explored in the Ultimate Guide to Sacred Geometry — The Torus.
Higher-Dimensional Polytopes
The construction that generates the tesseract from the cube extends to any number of dimensions. In five dimensions, translating the tesseract along a fifth axis perpendicular to all four of its own dimensions generates the 5D hypercube (penteract), with 32 vertices, 80 edges, 80 square faces, 40 cubic cells, 10 tesseract four-dimensional cells, and 1 five-dimensional interior. In six dimensions, the 6D hypercube (hexeract) has 64 vertices, 192 edges, 240 faces, 160 cubic cells, 60 tesseract cells, 12 penteract five-dimensional cells, and 1 six-dimensional interior.
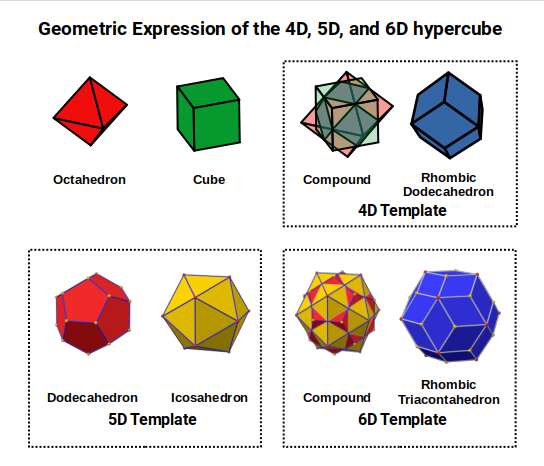
The element counts at each dimension follow Pascal's triangle: the number of k-dimensional elements in an n-dimensional hypercube is C(n, k) × 2^(n−k), where C(n, k) is the binomial coefficient. This formula encodes the full combinatorial structure of any hypercube in any dimension. The pattern of doubling and connecting that generates the tesseract from the cube is the same pattern at every level, and the regularity of this pattern is one of the reasons higher-dimensional hypercubes are tractable objects despite their apparent abstraction. In our geometric research, the 6D hypercube is of particular interest because it is the smallest hypercube whose projection into three dimensions can simultaneously represent all five Platonic Solids — a convergence of regular forms that appears to be deeply non-accidental.
The Torus and the Hypercube
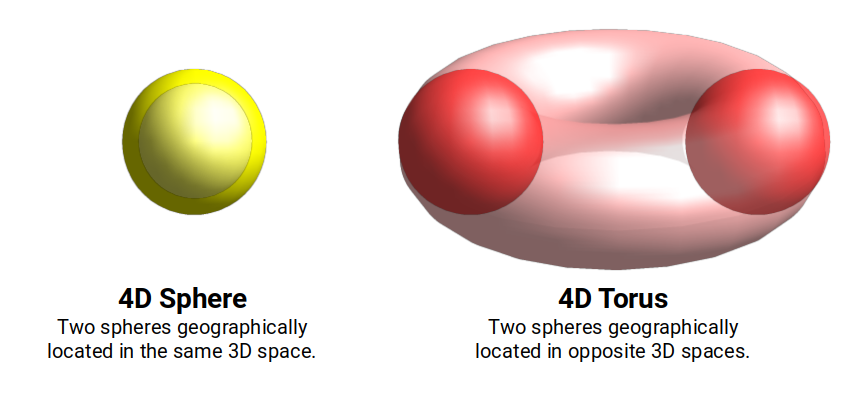
The torus and the hypercube are not merely two separate topics within 4D geometry — they are geometrically related in a precise and physically significant way. The Clifford torus, defined as S¹ × S¹ embedded in four-dimensional space, lives naturally within S³ — the three-dimensional sphere in four-dimensional Euclidean space. The tesseract also lives naturally in four-dimensional Euclidean space, and the two forms share the same ambient four-dimensional space. More concretely: the 16 vertices of the tesseract can be arranged symmetrically on the surface of the Clifford torus, so that the torus passes through all sixteen vertices. The torus threads the tesseract.
In our geometric model, the relationship between the torus and the hypercube maps onto a physical principle: the transition from field to structure, from continuous to discrete, from wave to particle. The torus represents the dynamic, flowing, field-geometric mode of four-dimensional organisation — energy circulating through the two independent cycles of the S¹ × S¹ topology. The hypercube represents the static, rectilinear, container-geometric mode — a four-dimensional box that defines a bounded region of spacetime. The torus transmits; the hypercube receives and re-expresses. You can explore the intuitive and symbolic dimensions of this relationship in our Ultimate Guide to Sacred Geometry — The Torus.
This complementarity mirrors the wave-particle duality of quantum mechanics: waves (toroidal field dynamics) and particles (hypercubic discrete structure) are not contradictory descriptions of reality but complementary geometric modes of the same four-dimensional underlying reality. The shift from one mode to the other is not a collapse or a mystery but a geometric transformation — the torus resolving into the tesseract, the continuous resolving into the discrete, the circulating field crystallising into the rectilinear container. Understanding both forms, and the geometric relationship between them, is the beginning of a genuinely four-dimensional geometric intuition.
Conclusion
Four-dimensional geometry extends every pattern established in three dimensions — the tesseract mirrors the cube as the cube mirrors the square, the 6D hypercube simultaneously contains all five Platonic Solids in projection, and the Clifford torus threads the tesseract's sixteen vertices with continuous cyclic symmetry. The complementarity of the torus (field, continuous, circulating) and the hypercube (structure, discrete, rectilinear) maps onto a physical principle: the transition from wave to particle, from field to form. These are not merely abstract constructions but the geometric language of a deeper reality.
This concludes the systematic survey of Euclidean and higher geometry. The final chapter draws together the themes of the guide and points toward further reading — Conclusion and Further Reading.
FAQ
What is the topological genus of a torus and why does it matter?
The torus has genus 1 — it has one handle, meaning one through-hole. This distinguishes it fundamentally from the sphere (genus 0), which has no handles and is simply connected. Genus matters because it determines what kinds of paths are possible on the surface: on a sphere, every closed loop can be shrunk to a point; on a torus, there are two independent classes of loop (around the hole and around the tube) that cannot be contracted. This difference controls everything from the torus's magnetic field behaviour to its use in topology as a classification of surfaces.
What is the Clifford torus and why is it significant?
The Clifford torus is a flat torus embedded in four-dimensional space. Unlike the ordinary 3D torus, which curves more sharply on its inner surface than its outer surface, the Clifford torus has uniform curvature at every point — a property impossible in three dimensions but natural in four. It is defined as the set of points (cos θ, sin θ, cos φ, sin φ) in four-dimensional Euclidean space, where θ and φ are independent angles. Its existence confirms that the torus is intrinsically a four-dimensional surface.
How many vertices, edges, faces, and cells does a tesseract have?
A tesseract (4D hypercube) has 16 vertices, 32 edges, 24 square faces, and 8 cubic cells. These numbers follow directly from the dimensional ladder: each element of a cube doubles and gains new connecting elements when the cube is translated into a fourth dimension. The 8 cubic cells correspond to the 6 square faces of the cube plus 2 additional cells along the fourth-dimensional axis.
What is the relationship between the torus and the hypercube in 4D geometry?
The torus and the hypercube are the two fundamental 4D geometric forms: the torus describes cyclic flow and field containment, while the hypercube describes the container of a moment in four-dimensional space. In our geometric model, the torus acts as the dynamic field structure that transmits energy, while the hypercube provides the dimensional scaffolding that receives and re-expresses it. The transition from toroidal to hypercubic geometry corresponds to the shift from field propagation to discrete, quantised structure.